![]()
Robot AGV AMR 無人搬運車 , 雷射導航 , 地圖定位導航
Lidar Slam Navigation 雷達導引
Autonomous Mobile Robot
PathEdit and Client (軟體作業平台 Microsoft Windows 7/10)
下載與安裝測試軟體 PathEdit and Client Tools for AMR and Slam Simulator Version 2.4.1

AGV Automated Guided Vehicle 無軌道無人搬運車

快速路徑規畫與彈性路徑設計,依照自己的需求,自行規畫流程,
簡單使用無需軌道,色帶,磁條,不用施工,不需RFID定位
開放介面,支援上位系統(VMS),派車命令
可以簡單使用AB兩點往復工作也可透過網路傳送多路徑派車系統
機器人的移動是使用雙輪差速
所有的應用軟體都使用Windows人機介面,操作容易
不需請ROS的SLAM軟體工程師,就可使用我們的SLAM軟體,功能
包含建圖,定位,路徑規畫,遇到障礙物停止,適合一般機械廠,想開發
出適合自己的AMR搬運車
SLAM 簡介
Localization
Mapping
Path Planning
Avoidance
Robot SLAM technology Simultaneous localization and mapping
即時定位與地圖構建
使用激光雷達與SLAM演算法完成機器人地圖定位導航
機器人室內地圖建立,由於機器人在室內並無法知道自身位置在哪裡,
透過SLAM技術做定位,機器人可以知道它在室內的正確位置,
機器人的眼睛不是使用攝影機,而是360/270度的激光雷達,
使機器人能正確的建立室內地圖,計算正確座標,
*** 非ROS 機器人作業系統 Non-ROS Robot Operation System ***
Mapping 建圖
機器人室內地圖建立,使用Wifi遙控機器人,滑鼠遙控技術
使用SLAM技術,ICP(Iterative Closest Point)演算法,
將每張掃描的地圖疊合,一步一步完成整個空間地圖
當室內環境完全掃描後,輸入至編輯軟體,再進行路徑規劃
建圖方式有二種:
1.即時式建圖: 機器人走過路徑,沿途即時建圖
2.收集式建圖: 機器人走完全程後,運算收集的資料完成建圖`
支援LoopClosure,反光板
Localization 定位
機器人的定位技術的發明,大大的推進科技里程碑,
從家用掃地機,無人搬運車,到未來的機器人都必須使用到,
機器人透過機器人的眼睛,360/270度的激光雷達,掃描空間
再比對先前建立好的地圖得知機器人座標在地圖中哪裡,
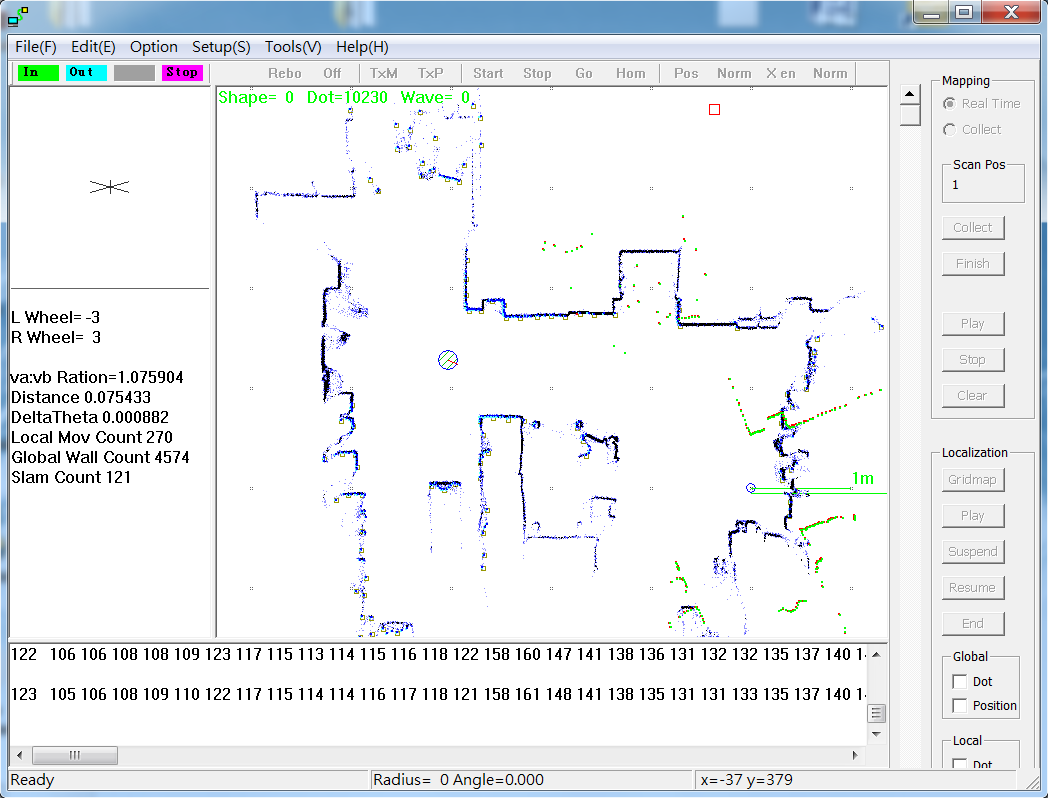
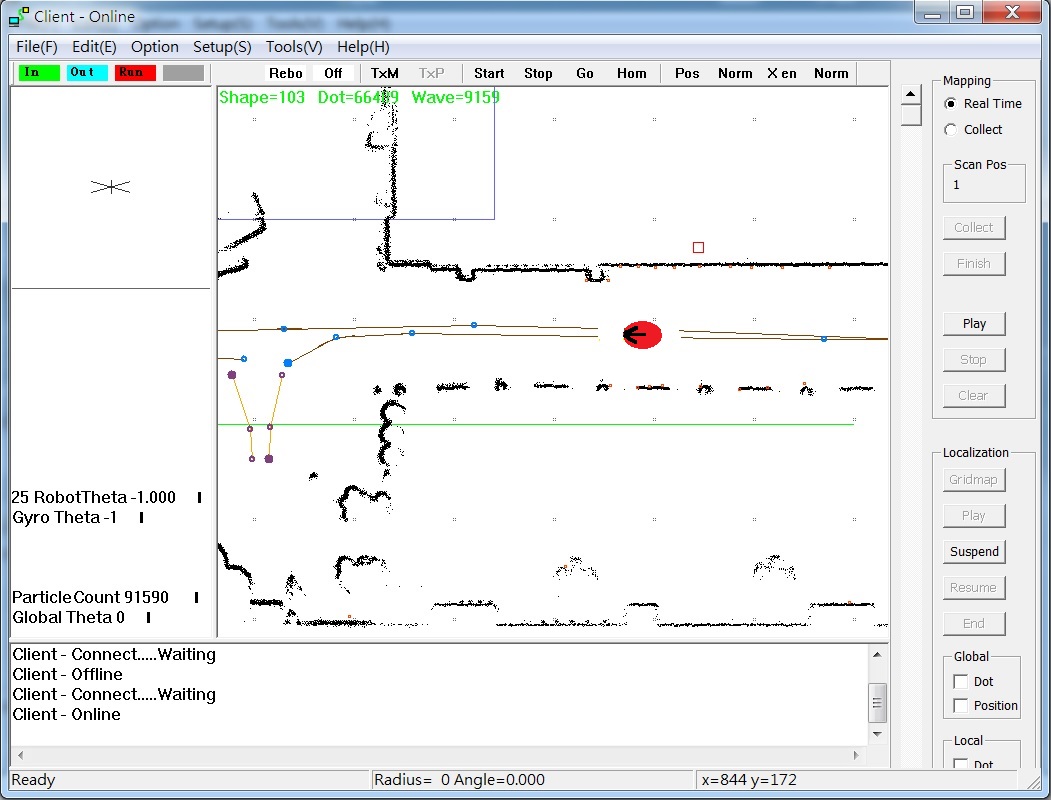
透過Client應用程式,時時刻刻監控掌握機器人正在何處,將會去哪裡
使用 Particle Filter 演算法計算座標,快速又好用的演算法
無人搬運車在感測器被遮避時會自動切換到米輪(雙輪)定位
暫時使用車輪定位,搬運車可持續移動,移動到感測器重新辨認出
地形後會切換回雷射激光雷達定位
Robot AGV Automated guided vehicle
Robot AGV 無人搬運車路線規劃,機器人速度可調,曲線路徑更流暢
不使用磁條,不需施工,系統安裝方便
路徑規劃更有彈性,使用電腦規劃路徑
機器人自動導航時可使用雷射區域防護,有警告與警急停止
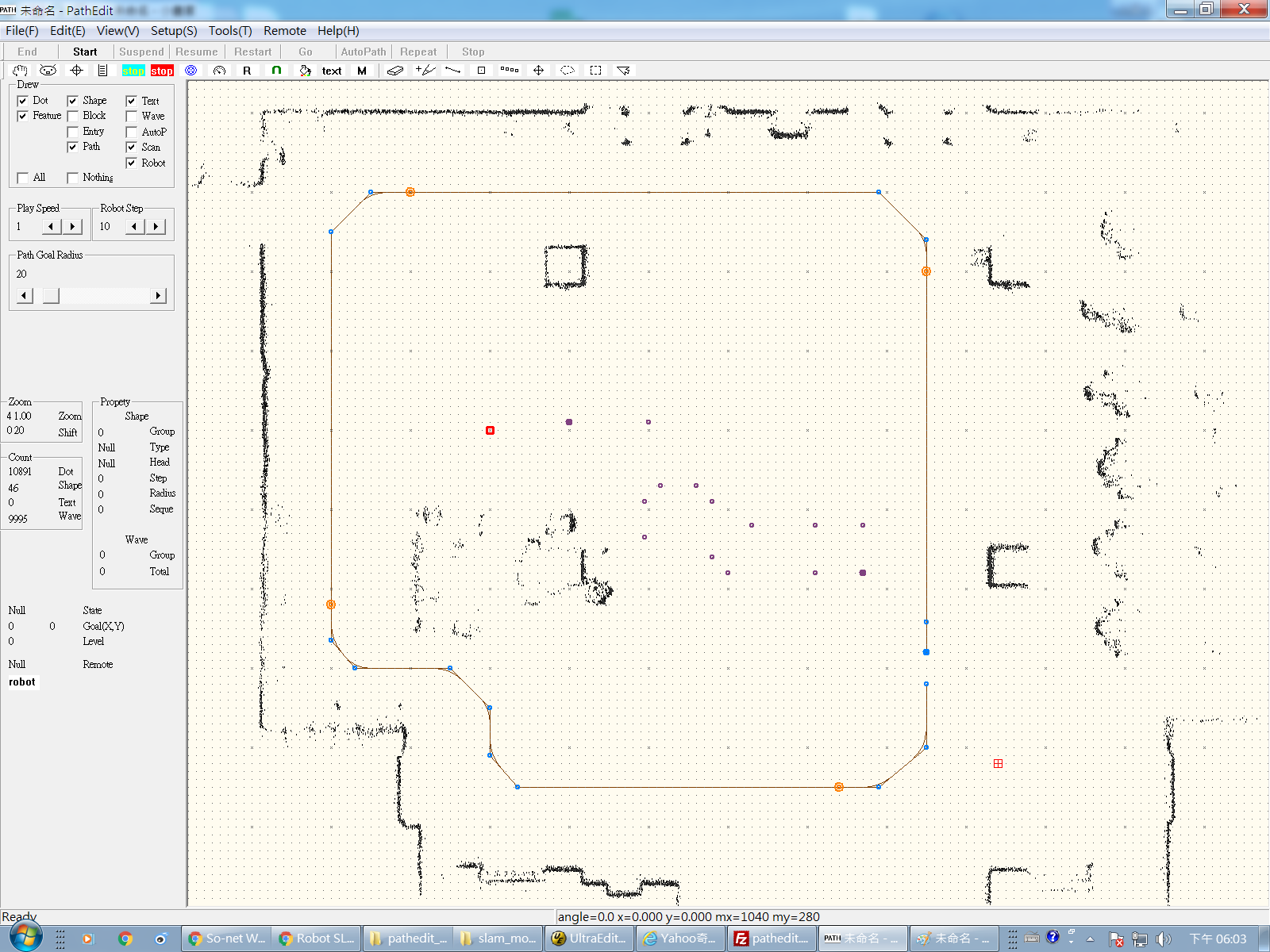
PathEdit 路徑編輯
Path planning and edit
PathEdit路徑編輯器是專業的SLAM編輯軟體
或是增加,移除,修改地圖內容,可快速完成機器人路徑
使用匯出(EXPORT)或匯入(IMPORT)文字檔的功能,再使用文字編輯器修改內容
讓資料處理更有彈性,透明性,編輯性
雷射定位導航軟體規格 SLAM Software Specification
* 激光雷達 SICK LMS100 或 PEPPERL+FUCHS R2000
* 定位精度(+/-)2cm , Enable OdoFilter(+/-)1cm
* AMR AGV移動速度最快可達1m/sec
* 路徑規劃可選擇多重路徑PathLink或AB兩點最短規劃路線
* 前進,後退,原地旋轉,避障距離調整
* 激光雷達可選擇單一激光雷達或雙激光雷達定位
* 提供2種建圖方法(1)即時建圖(2)收集資料結束後再計算資料建圖
* 地圖資料可匯出,匯入Text File
* 支援車輪定位Odometry,編碼器與陀螺儀(TL740D)定位導航(IMU),
* 支援反光板定位Reflector
* 支援十張地圖,可分樓層使用
* 支援回環地圖誤差修正 LoopClosure
*** 進階課程 *** *** 深入了解 *** *** 影片教學 ***
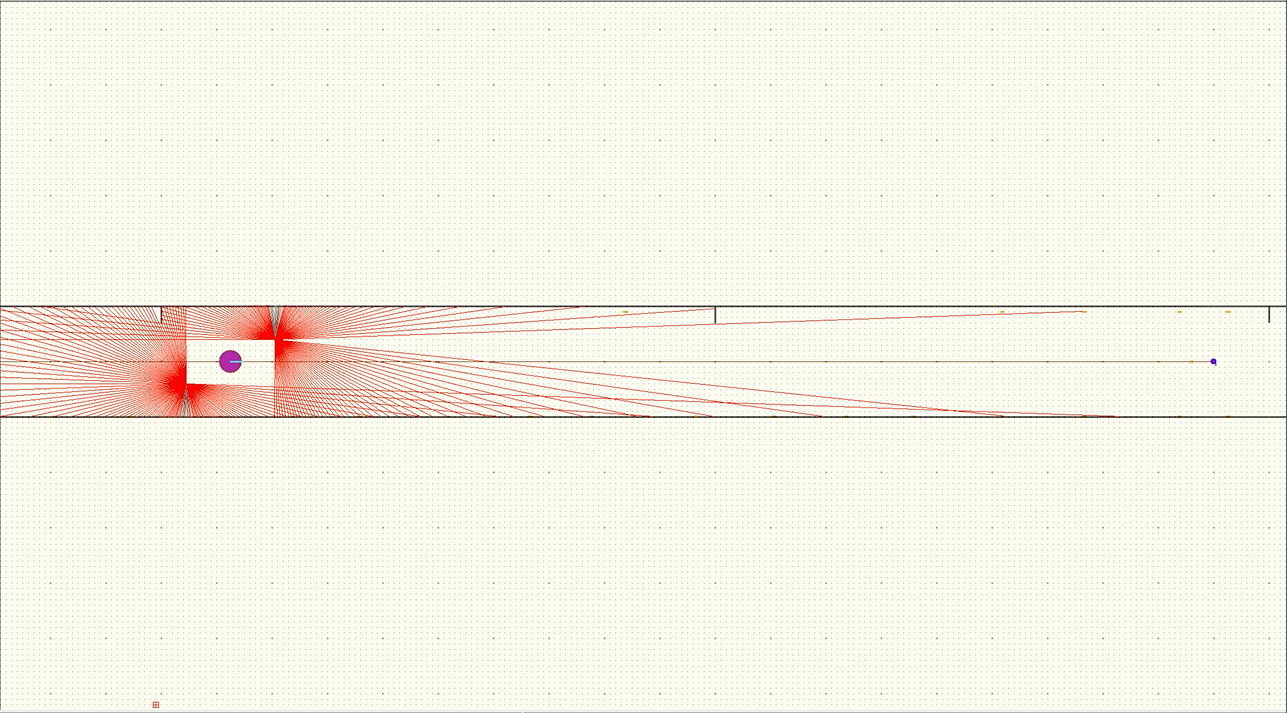
軟體介紹與激光雷達模擬器使用 slam simulation
*** 進階課程 1 ***
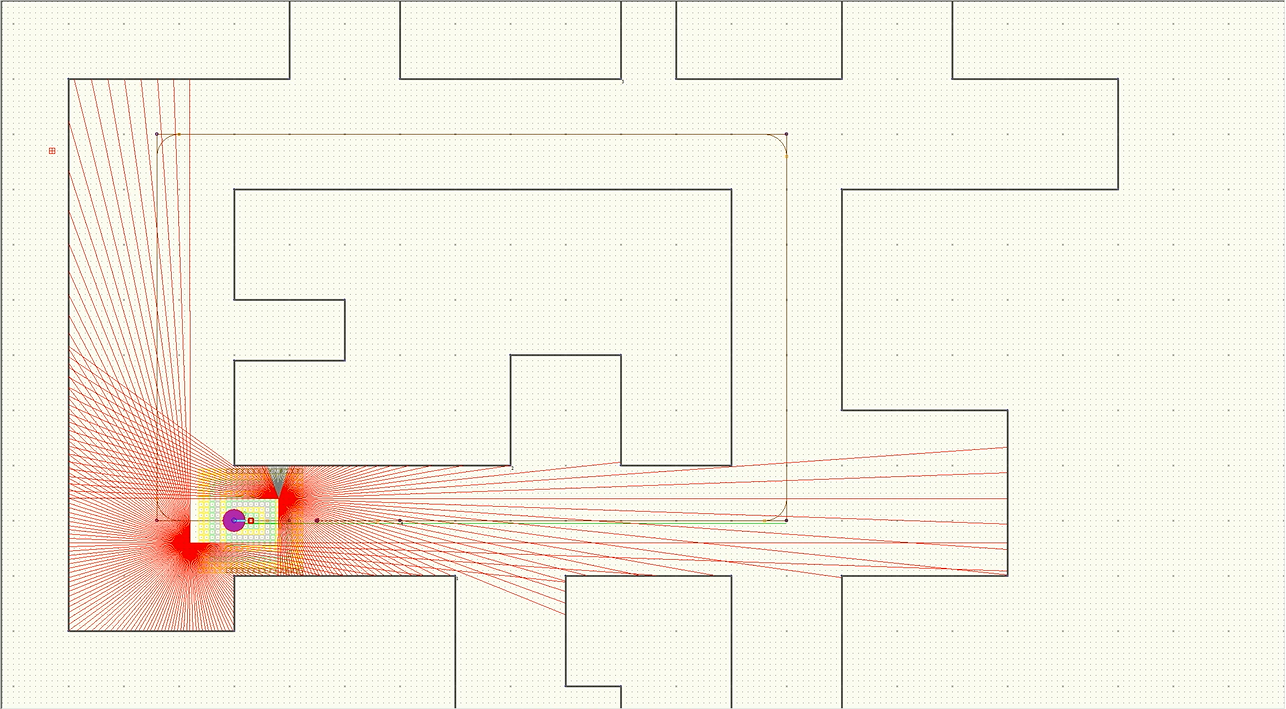
使用激光雷達模擬器可以建立任意地形,一般實驗室太小,地形只有固定幾個
透過PathEdit創建特殊地形例如長廊,大空間,在模擬的空間中可以測試演算法
快速又方便,模擬器中可以加入反光板,激光雷達座標可調,掃描角度可調
激光雷達掃描線可加雜訊(noise)模擬真實的激光雷達訊號,如上圖與影片
*** 進階課程 2 ***
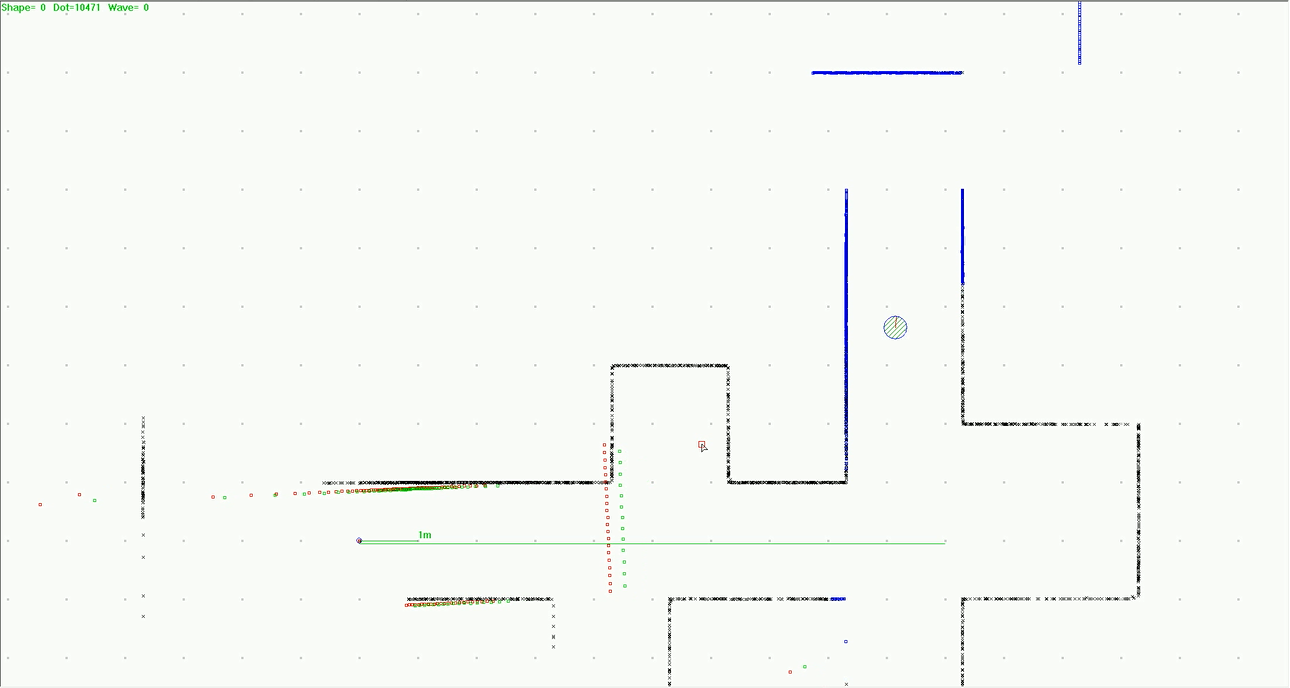
Mapping建圖,Localization定位
一般初學的slam工程師對地形特徵點不瞭解或無法察覺,對激光雷達掃描線如何掃描
沒有慨念,常會建圖出問題或是遇到搬運車迷航查不出源因,需要資深的slam工程師
觀察地形解決問題,如果透過激光雷達模擬器(slam simulator),一般初學的slam工程
師就可快速掌握建圖與定位關鍵技術,在模擬器上快速反覆的驗正理論想法,達到培
養slam的地形觀測技術,如上圖與影片
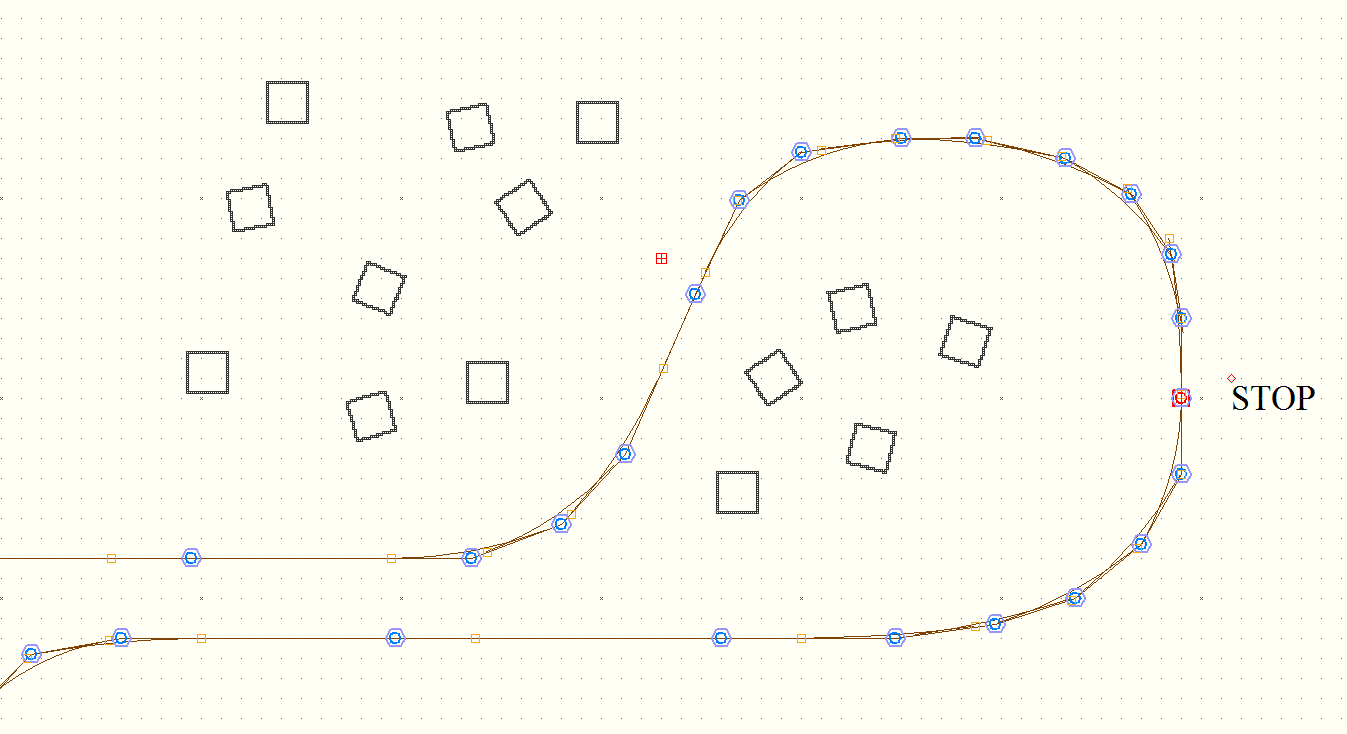
*** 進階課程 3 ***
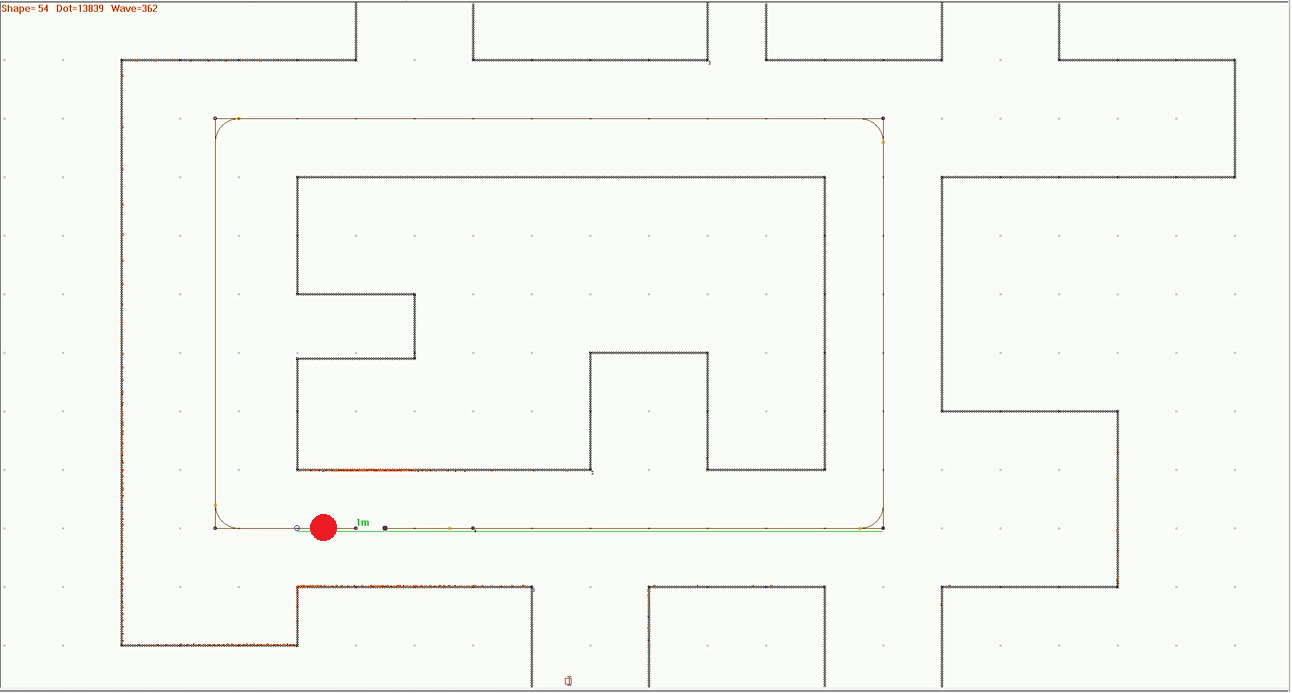
PathLink 是個無人搬運車的路徑規劃方法,每條路徑都可以指定停止,速度,避障,定位方法
透過連結每一條路徑達到全廠都能規畫路徑地圖的方法,
先在PathEdit內設計好路徑,再傳送到搬運車上的行車電腦,行車電腦將擁有所有的路線圖
只要在發車時把指定要走的路線,送出給行車電腦,另可透過AB兩點演算法,把路徑連結簡單化
點到點最短路徑 Point-to-Point Shortest Path,如上圖與影片
*** 進階課程 4 ***
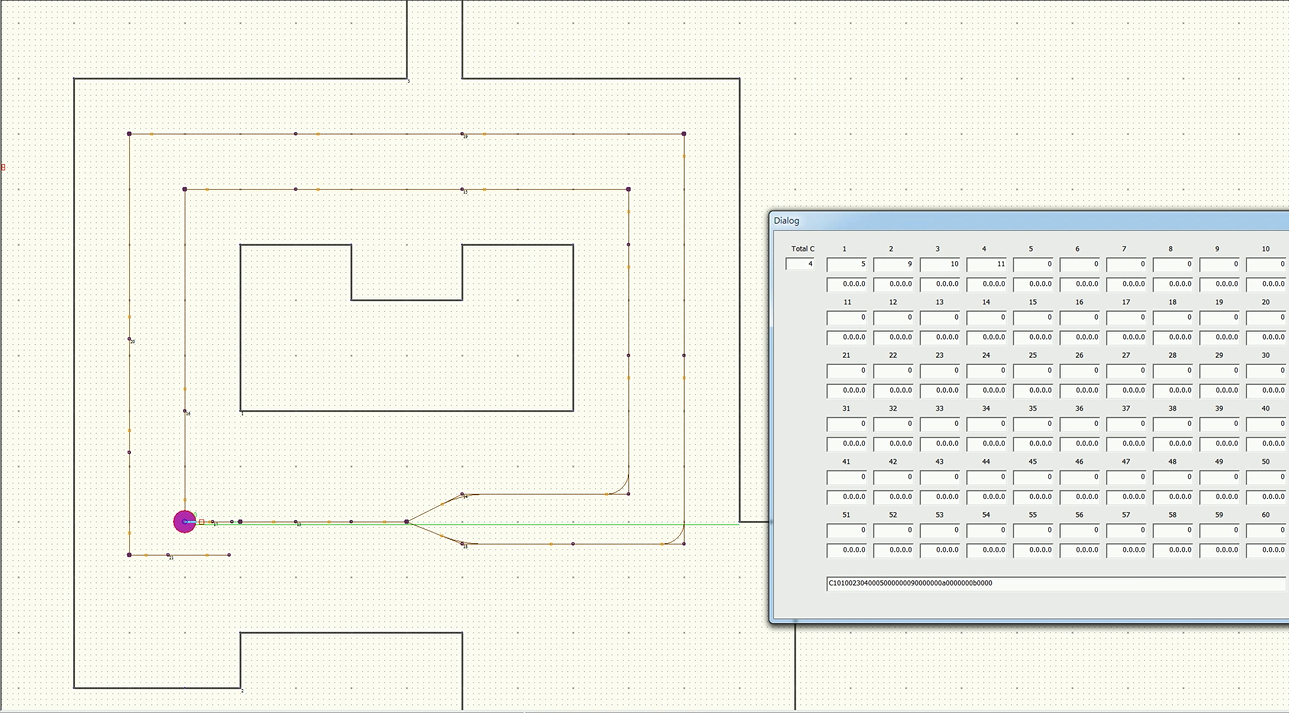
SLAM reflector for support , narrow passage , narrow hallway , narrow aisle
支援反光板(反光貼)定位與建圖,反光板是可以補救特徵點的不足,當特徵點不足時,地圖無法
建立,機器人移動時容易迷航,在長廊,窄巷這個特別的地形,常會出現中間有一段區域離入口
太遠沒有機台,沒有櫃子做為參考,就需要在牆上貼上反光板(反光貼),會變動的貨架也是一樣
我們可以在PathEdit上模擬反光板,建立出長廊窄巷的形狀出來,真實的環境就可依照模擬的
位置擺上反光板,定位和建圖都可使用,常常在工廠或是展覽會場上看到反光板做為slam定位
,橘色的標示就是反光板,反光貼,如上圖與影片
*** 進階課程 5 ***
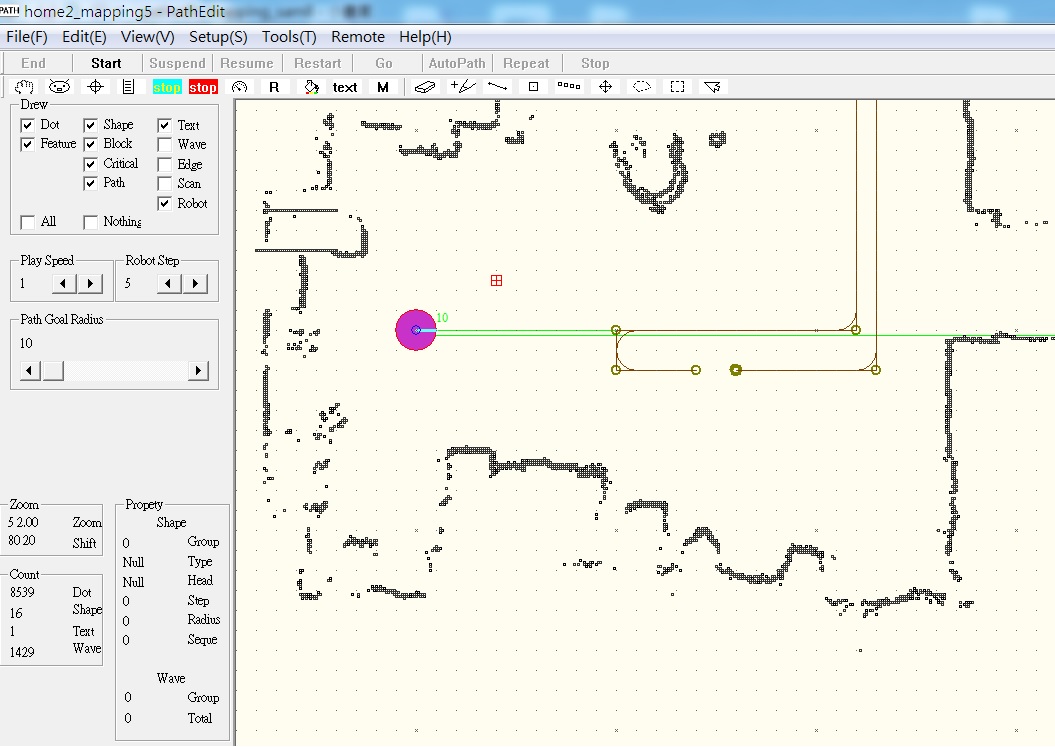
SLAM odometry (encoder and imu)
支援車輪(米輪,編碼器)定位,可用在小斜坡或是會容易變動的區域,可輕易的在PathEdit上
完成車輪定位路徑設定會變動的區域無法使用輪廓定位,這些區域沒有固定的型狀,每一段
時間後就會變動,可能是倉庫或是多人在走動的區域,如上圖
*** 進階課程 6 ***
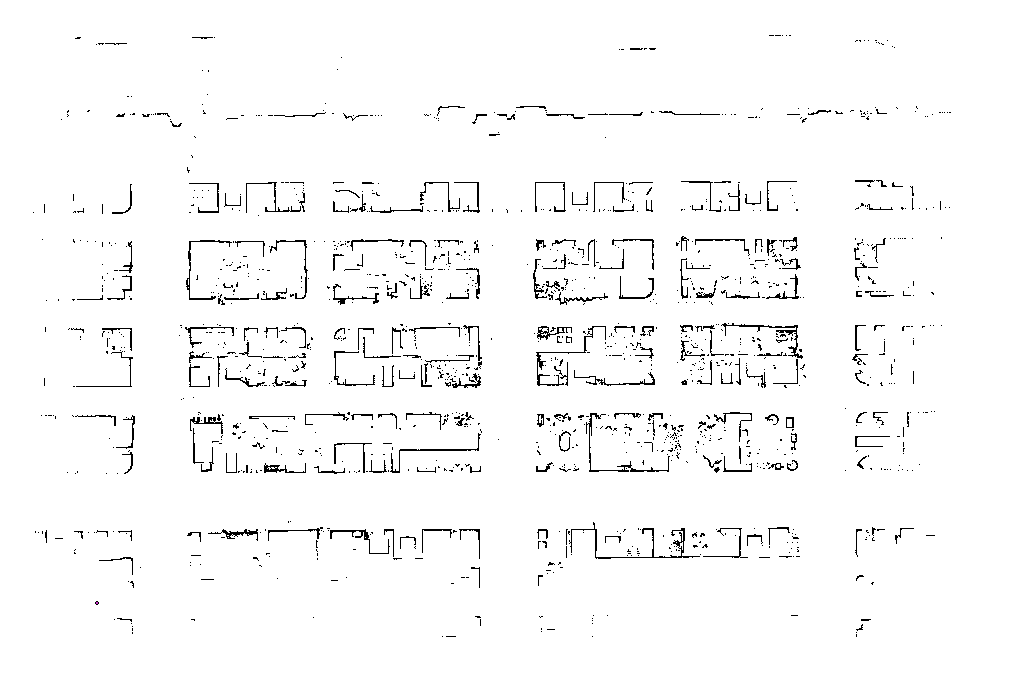
2021 Taiwan Taipei Automation Intelligence and Robot Show (100m X 50m)
使用Client軟體測試建圖功能,開啟檔案Client=>Open=>file"taipei_collect3_outround"
Setup=>LaserScan=> (1).ScanSize=>360 ... (2).Disable Two Lidar
Setup=>Mapping=> (1).Calculate=>Normal ... (2).Collect Mapping Interval=>2
圖面原點點兩下(mouse double click),點選右邊 Collect => 按 Play 開始建圖...... 下載資料檔 Collect File
*** 進階課程 7 ***
PathEdit 與 Client 使用請參考影片
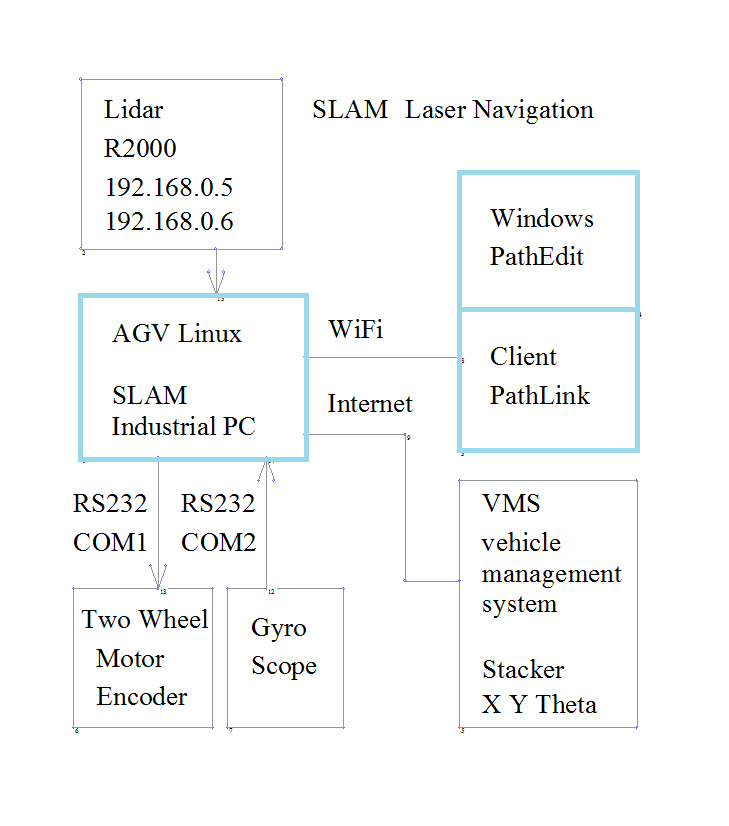
AGV Linux 與 Two Wheel Motor Encoder 通訊協定,請參考 MotorProtocol_V1_x 在 Motor Control檔案內
GyroScope 只需接上就可使用 , VMS 不在此系統內,請自行開發
初次使用沒有 GyroScope 沒有 Encoder 只有激光雷達,只要在Config設定不使用,也可建圖與定位
PathEdit => 編輯地圖與路徑,離線工作
Client => 從遠端連線到AGV Linux,建圖(Mapping),監控AGV Linux狀態
AGV Linux => 安裝在搬運車上,使用激光雷達感測器定位自己的座標
*** 進階課程 8 ***
三個應用程式功能比較 PathEdit,Client and AGV_Linux Function Table
Function\Application Software PathEdit Client AGV_Linux
Lidar Scan Mapping No Yes No
Lidar Reflector Mapping No Yes No
Lidar Positioning No Yes Yes
Reflector Positioning No No Yes
Odometry Positioning No No Yes
Path Link Yes No Yes
Path Planning(Edit) Yes No No
Map Edit Yes No No
AGV_Linux Status Monitor No Yes No
AGV_Linux Config No Yes No
*** 進階課程 9 ***
建議使用無風散電腦,需有兩個RS232兩個Ethernet,Memory8~16G

*** 進階課程 10 ***
*** 安裝AGV_Linux後開機就可以連線R2000激光雷達,在Client可以建圖或定位 ***
*** QuickStart可以快速了解使用方法,SLAM User Manual 有完整的使用說明 ***
Quick Start
SLAM User Manual
*** 進階課程 11 ***
*** AGV Linux 工業電腦透過RS232連接到馬達控制器,控制左輪馬達和右輪馬達 ***
*** 馬達控制器可以為PLC控制器或是單晶片微處理器馬達控制板 ***
AMR方向速度測試時,可以使用Client傳送速度到工業電腦,工業電腦再傳送到馬達控制器
AGV_Linux 的程式會先下0x91的命令,成功建立連線後再下0x92,0x93,0x95的命令,一直重
複0x92,0x93,0x95,如果通訊中斷(斷訊),會再重新建立連線,送出0x91的命令
馬達控制器通訊協定是屬於比較專業的韌體程式設計,需要有韌體開發經驗的工程師來完
成,一般來說兩周內都可完成,第一周閱讀說明書與寫程序,第二周可以debug,測試
程式範例可以在MotorProtocol內找到,韌體程式設計師可以拿來參考,縮短開發時間
Motor Control
*** 進階課程 12 ***
*** 已經在實際的搬運車上(AMR)測試過,需要使用派車系統直接操控 ***
*** 就可下載以下軟體,依照UI提供的source code編輯自己的程式 ***
UI內含有程式原始碼,使用TCP/IP對搬運車上AGV_Linux下命令,啟動,暫停.......
AGV_Linux可以回傳搬運車上所有的狀態(Status)提供上位系統判斷
UI(User Interface) only include source code of UI2
***本導航系統不是使用ROS請注意***
Line 技術諮詢

andylen2014@gmail.com
Copyright 2016-2024 .All rights reserved